Communicating State Machines
自动机通信:
- 一个自动机的输出是另一个自动机的输入
- 一个自动机观察另一个自动机的输出
自动机分解:将一个大自动机分解成多个小自动机
例——闪光灯¶
输入:start
输出:light
功能:
- 当
start拉高1CC, 闪光灯开闪 - 每次闪3次
- 每次闪时拉高6CC, 拉低4CC
- 闪完后,关灯,等待下次闪
分解1:
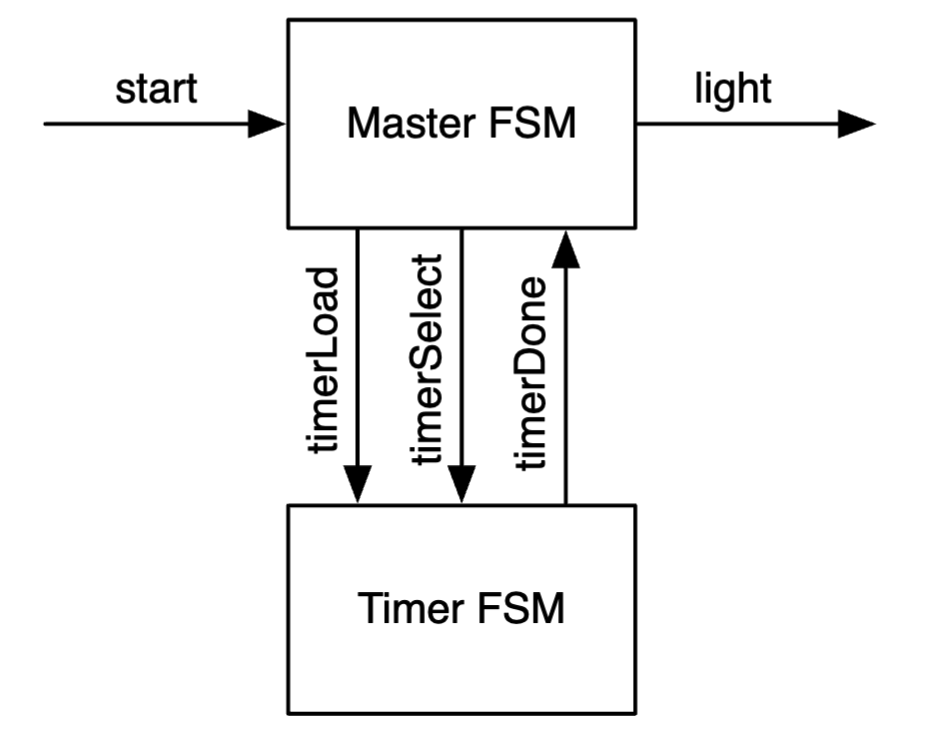
- 主FSM:控制闪烁
- 计时FSM:负责等待
timerLoad拉高,计时器载入被递减的初始值timerSelect选择load = 5 / 3timerDone当计数结束时被拉高- 其余时间计数器自己往下走
实现:
class LightFlasher extends Module {
val io = IO(new Bundle {
val start = Input(Bool())
val light = Output(Bool())
})
io.light := false.B
val timerLoad = WireDefault(false.B)
val timerSelect = WireDefault(true.B)
val timerDone = Wire(Bool())
val timerReg = RegInit(0.U)
timerDone := timerReg === 0.U
when(!timerDone) {
timerReg := timerReg - 1.U
}
when(timerLoad) {
when(timerSelect) {
timerReg := 5.U
}.otherwise {
timerReg := 3.U
}
}
timerLoad := timerDone
object State extends ChiselEnum {
val off, flash1, space1, flash2, space2, flash3 = Value
}
import State._
val stateReg = RegInit(off)
switch(stateReg) {
is(off) {
timerLoad := true.B
when(io.start) {
stateReg := flash1
}
}
is(flash1) {
timerSelect := false.B
io.light := true.B
when(timerDone) {
stateReg := space1
}
}
is(space1) {
when(timerDone) {
stateReg := flash2
}
}
is(flash2) {
timerSelect := false.B
io.light := true.B
when(timerDone) {
stateReg := space2
}
}
is(space2) {
when(timerDone) {
stateReg := flash3
}
}
is(flash3) {
timerSelect := false.B
io.light := true.B
when(timerDone) { stateReg := off }
}
}
}
- 默认状态:当自动机未达到改变该值的状态时,Wire值不会锁存,而是会变为默认状态
- 可以将"multi-driven wire"的信号理解为不同条件下的不同取值
- 当多次设置默认状态时,后设置的覆盖之前设置的
- Reg值会锁存
timerLoad := timerDone覆盖val timerLoad = WireDefault(false.B)成为timerLoad的默认值,即主自动机不对timerLoad进行设置(条件触发)时,timerLoad将由timerDone决定- 主自动机解读:
- 初始时,位于
off态,按住timerLoad- 若不按住
timerLoad,则会被timerDone影响而自动向下走 start拉高后,转移到flash1态
- 若不按住
- 进入
flash1态后,timer开始从5到0倒计时,倒计时期间始终处于flash1态(stateReg锁存),按住light,timerSelect- 若不按住
light,则会被默认值关闭 - 按住
timerSelect,为下一次倒计时选择3..0- 事实上,不按住
timerSelect,而是在转移时拉低行为上也正确,但会导致拉低的条件更复杂 - 只需保证在
timerLoad为高即timerDone为高时,timerSelect为低即可为timerReg选择正确的输入值3
- 事实上,不按住
- 若不按住
- 初始时,位于
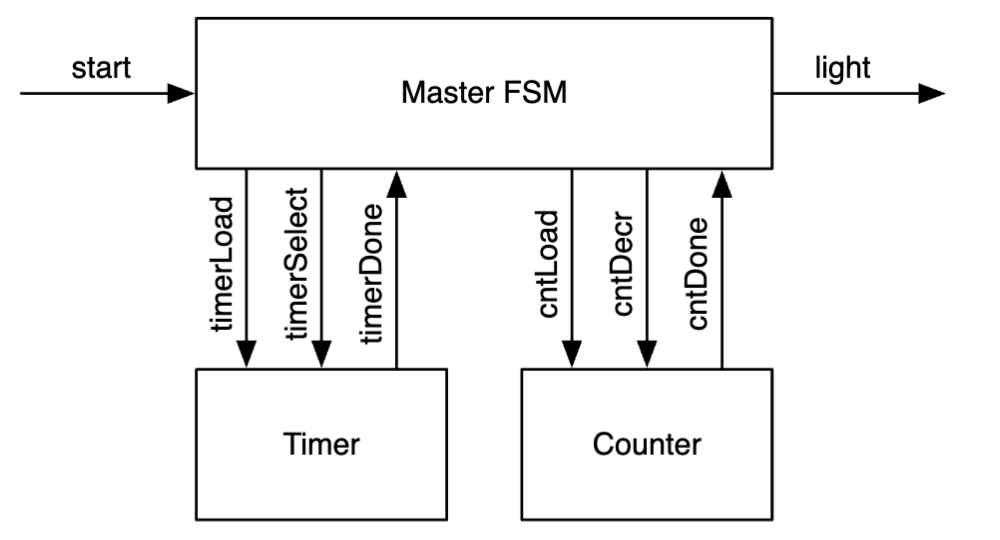
问题:存在冗余性,flash1, flash2, flash3功能相同,space1, space2功能相同
分解2:引入计数器,主自动机简化为3个态
 实现:
实现:
class LightFlasher extends Module {
val io = IO(new Bundle {
val start = Input(Bool())
val light = Output(Bool())
})
io.light := false.B
val timerLoad = WireDefault(false.B)
val timerSelect = WireDefault(true.B)
val timerDone = Wire(Bool())
val timerReg = RegInit(0.U)
timerDone := timerReg === 0.U
when(!timerDone) {
timerReg := timerReg - 1.U
}
when(timerLoad) {
when(timerSelect) {
timerReg := 5.U
}.otherwise {
timerReg := 3.U
}
}
timerLoad := timerDone
val cntLoad = WireDefault(false.B)
val cntDecr = WireDefault(false.B)
val cntDone = Wire(Bool())
val cntReg = RegInit(0.U)
cntDone := cntReg === 0.U
when(cntLoad) { cntReg := 2.U }
when(cntDecr) { cntReg := cntReg - 1.U }
object State extends ChiselEnum {
val off, flash, space = Value
}
import State._
val stateReg = RegInit(off)
switch(stateReg) {
is(off) {
timerLoad := true.B
timerSelect := true.B
cntLoad := true.B
when(io.start) { stateReg := flash }
}
is(flash) {
timerSelect := false.B
io.light := true.B
when(timerDone & !cntDone) { stateReg := space }
when(timerDone & cntDone) { stateReg := off }
}
is(space) {
cntDecr := timerDone
when(timerDone) { stateReg := flash }
}
}
}
- 在每次
space要发生转移时,cntDecr被拉高,即第一次space -> flash后,cntReg = 1; 第二次space -> flash后,cntReg = 0,之后flash无法进入space
带Datapath的自动机¶
Datapath:用于对自动机间通信的信号做运算,而不是仅仅只通信控制信号