排序
选择排序¶
步骤:每次选择最大的放最后
冒泡排序¶
步骤:若前一个元素大于后一个元素,交换;从第i个开始,共重复n轮
优化:记录上一次冒泡的终止位置,每次冒到终止位置即截止
插入排序¶
步骤:每次将没排好的元素插入
void InsertionSort(ElementType A[], int n) {
int j, P;
ElementType Tmp;
for (P = 1; P < N; P++) {
Tmp = A[P];
for (j = P; j > 0 && A[j-1] > Tmp; j--) A[j] = A[j - 1];
A[j] = Tmp;
}
}
普通排序算法的下界分析:
- 逆序:\((i,j),i<j,A_i>A_j\)
- 最好情况逆序数0,最坏情况(倒序)逆序数\(\dfrac{N(N-1)}{2}\),平均逆序数\(\dfrac{N(N-1)}{4}\)
问题:不能在相邻位置比较,需要跳着比较和交换
希尔排序¶
思想:跳着比较
步骤:
- 分组:按组距分组,组内插入排序
- 减小组距再排序,直到组距为1
原理:
- 插入排序在数据较有序时为\(O(n)\),无序时为\(O(n^2)\)
- 数据较乱时分组,\(O((n/k)^2\times k)=O(n^2/k)\),优化复杂度
- 后期数组较有序,为线性
分组策略:
- 核心思想:防止数据落入同一组,导致重复比较
- Hibbard's Increment Sequence:\(h_k=2^k-1\) \(O(N^{3/2})\)
- Sedgewick's best sequence:\(h_k=9\times4^i–9\times2^i+1\)
void Shellsort(ElementType A[], int N) { int i, j, increment; ElementType Tmp; for (Increment = N / 2; Increment > 0; Increment /= 2) { // 插入排序 for (i = Increment, i < N; i++) { // 抛去开头元素, 依次插入 Tmp = A[i]; for (j = i; j >= increment; j -= increment) if (Tmp < A[j - Increment]) A[j] = A[j - Increment]; else break; A[j] = Tmp; } } }
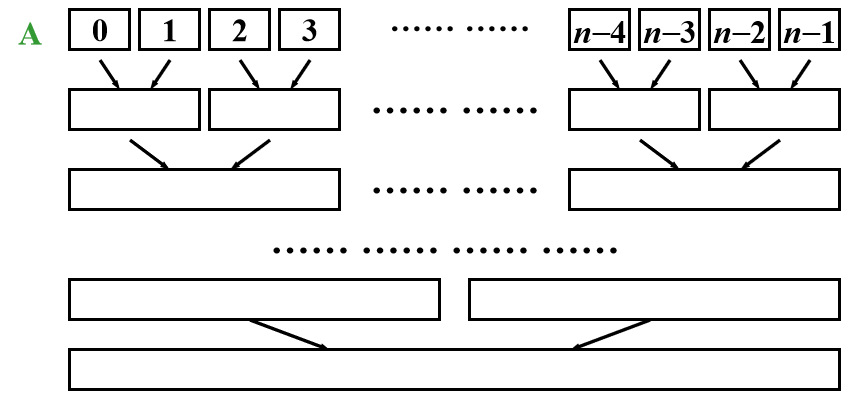
堆排序¶
思想:树形选择——次大点仅可能从叶子节点到根的路径上的点相遇过,比较次数降为\(\log\)
BuildHeap(H); // O(N)
for (i = 0; i < N; i++)
TmpH[i] = DeleteMin(H); // O(logN)
for (i = 0; i < N; i++)
H[i] = TmpH[i];
缺点:空间浪费
解决:删除\(\iff\)放在数组末尾,交换首尾元素后将根向下调整
void HeapSort(ElementType A[], int N) {
int i;
for (i = N / 2; i >= 0; i--)
PercDown(A, i, N); // BuildHeap: 从最后一个有儿子的节点开始向下调整
for (i = N - 1; i > 0; i++) {
Swap(&A[0], &A[i]); // DeleteMax
PercDown(A, 0, i);
}
}
问题:数组从0开始,堆从1开始,父子节点对应关系不同
归并排序¶
思想:分治
- 分:划分子问题
- 治:递归求解
- 合并
void MSort( ElementType A[ ], ElementType TmpArray[ ],
int Left, int Right )
{ int Center;
if ( Left < Right ) { /* if there are elements to be sorted */
Center = ( Left + Right ) / 2;
MSort( A, TmpArray, Left, Center ); /* T( N / 2 ) */
MSort( A, TmpArray, Center + 1, Right ); /* T( N / 2 ) */
Merge( A, TmpArray, Left, Center + 1, Right ); /* O( N ) */
}
}
void Mergesort( ElementType A[ ], int N )
{ ElementType *TmpArray; /* need O(N) extra space */
TmpArray = malloc( N * sizeof( ElementType ) );
if ( TmpArray != NULL ) {
MSort( A, TmpArray, 0, N - 1 );
free( TmpArray );
}
else FatalError( "No space for tmp array!!!" );
}
/* Lpos = start of left half, Rpos = start of right half */
void Merge( ElementType A[ ], ElementType TmpArray[ ],
int Lpos, int Rpos, int RightEnd )
{ int i, LeftEnd, NumElements, TmpPos;
LeftEnd = Rpos - 1;
TmpPos = Lpos;
NumElements = RightEnd - Lpos + 1;
while( Lpos <= LeftEnd && Rpos <= RightEnd ) /* main loop */
if ( A[ Lpos ] <= A[ Rpos ] )
TmpArray[ TmpPos++ ] = A[ Lpos++ ];
else
TmpArray[ TmpPos++ ] = A[ Rpos++ ];
while( Lpos <= LeftEnd ) /* Copy rest of first half */
TmpArray[ TmpPos++ ] = A[ Lpos++ ];
while( Rpos <= RightEnd ) /* Copy rest of second half */
TmpArray[ TmpPos++ ] = A[ Rpos++ ];
for( i = 0; i < NumElements; i++, RightEnd - - )
/* Copy TmpArray back */
A[ RightEnd ] = TmpArray[ RightEnd ];
}
循环版本:两两合并
快速排序¶
void Quiclsort(ElementType A[], int N) {
if (N < 2) return;
pivot = pick any element in A[];
Partition S = {A[] \ pivot} into two disjoint sets:
A1 = {a ∈ S | a <= pivot} and A2 = {a ∈ S | a >= pivot};
A = Quicksort(A1, N1) ∪ {pivot} ∪ Quicksort(A2, N2);
}
- 思路:
- 单边扫描:状态
小 | 大 [未知],扫描时若大于主元则不操作,小于主元则与分界点交换 - 双边扫描:状态
小 [未知] 大,扫描至小 | 大 [未知] 小 | 大时交换
- 单边扫描:状态
循环设计思想:循环不变式 (处理过程中,什么关系一直存在)
相当于状态的确定:明确状态应是什么
例:快速排序划分——循环不变式:已处理序列应保持划分状态(小 | 大),状态由分界点确定;记录分界点位置,利用该点完成状态转移
主元确定:
- 选A[0]:会被卡\(O(N^2)\)
- 随机选取
- 三选一:left, right, center找中间值
void Quicksort(ElementType A[],int N) { Qsort(A, 0, N - 1); /*A: the array */ /*0: Left index */ /*N-1: Right index */ } /*Return median of Left, Center, and Right*/ /*Order these and hide the pivot*/ ElementTypeMedian3(ElementType A[], int Left, int Right) { int Center = (Left + Right) / 2; if (A[Left] > A[Center]) Swap(&A[Left], &A[Center]); if (A[Left] > A[Right]) Swap(&A[Left], &A[Right]); if (A[Center] > A[Right]) Swap(&A[Center], &A[Right]); /*Invariant: A[Left] <= A[Center] <= A[Right] */ Swap(&A[Center], &A[Right - 1]); /*Hide pivot*/ /*only need to sort A[Left+1] ... A[Right-2]*/ return A[Right - 1]; /*Return pivot */ } void Qsort(ElementType A[], int Left, int Right) { int i, j; ElementType Pivot; if (Left + Cutoff <= Right) { /*if the sequence is not to short */ Pivot = Median3(A, Left, Right); /*select pivot */ // 将最小元、最大元放在序列两端,保证循环不越界 i = Left; j = Right - 1; for (;;) { while (A[++i] < Pivot);/*scan from left */ while (A[--j] > Pivot);/*scan from right */ if (i < j) Swap(&A[i], &A[j]); /*adjust partition */ else break; /*partition done*/ } Swap(&A[i], &A[Right - 1]); /*restore pivot */ Qsort(A, Left, i - 1); /*recursively sort left part */ Qsort(A, i + 1, Right); /*recursively sort right part */ } /*end if - the sequence is long */ else /*do an insertion sort on the short subarray*/ InsertionSort(A + Left, Right - Left + 1); }
时间复杂度:\(T(N)=T(i)+T(N-i-1)+cN\),其中\(cN\)为划分时间;复杂度依赖于\(i\)
最坏:\(i=0\) \(T(N)=O(N^2)\)
最好:\(i=N/2\) \(T(N)=O(N\log N)\)
平均:
应用:找序列第\(k\)大数
- 划分: 小 | 主元 | 大
- 判断\(k\)与 |大| 的关系,决定在哪个区间继续分治
表排序¶
问题:大结构排序时交换开销大,尽可能一次交换完成排序
解决:为每个元素打上下标
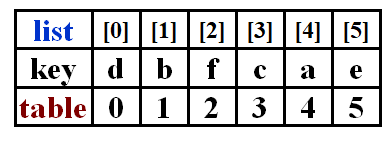
在table中指示排完后的元素的下标
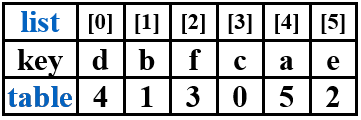
即list[table[0]],list[table[1]],...,list[table[n-1]]
然后对元素进行置换,置换过程形成一个环:先取首元素,再将所有元素均向前移,最后放入首元素
下界复杂度¶
定理:所有基于比较的排序算法最坏情况复杂度为\(\Omega(N\log N)\)
证明:决策树
- 比较过程构成决策树
- 决策树叶节点为所有可能排列,共\(N!\)个
- 故树高\(k\) s.t. \(N!\leqslant2^{k-1}\Rightarrow k\geqslant\log(N!)+1\)
- \(N!\geqslant (N/2)^{N/2}\Rightarrow\log(N!)\geqslant\Theta(N\log_2N)\)
桶排序¶
步骤:开一个桶,把数据丢进桶中,按序取出
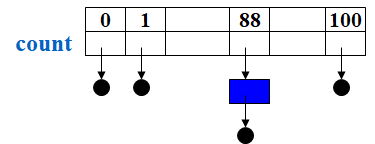
initialize count[ ];
while (read in a student’s record)
insert to list count[stdnt.grade];
for (i=0; i<M; i++) {
if (count[i])
output list count[i];
}
基数排序¶
步骤:先将所有元素按最低位入桶,顺序取出后再按倒数第二位入桶,直至排序完毕
按照键\(K_i^j,K_i^0,K_i^{r-1}\)排序
MSD:最高位优先
LSD:最低位优先