Image feature
Invariant local features¶
不变量:translation, rotation, scale
特征检测:Harris corner detector
- 思想:角点更适合做特征点
- 刻画:找到包含大梯度且梯度朝向不同的窗口
- 推导:设窗口\(W\)位移为\((u,v)\),SSD误差为
\[
E(u,v)=\sum_{(x,y)\in W}[I(x+u,y+v)-I(x,y)]^2
\]
\[I(x+u,y+v)\approx I(x,y)+\dfrac{\partial I}{\partial x}u+\dfrac{\partial I}{\partial y}v\approx I(x,y)+[I_x I_y]\begin{bmatrix}u\\ v\end{bmatrix}\]
\[E(u,v)\approx\sum_{(x,y)\in W}\left[[I_x I_y]\begin{bmatrix}u\\ v\end{bmatrix}\right]^2=\sum_{(x,y)\in W}[u\ \ v]\begin{bmatrix}I_x^2&I_xI_y\\ I_yI_x&I_y^2\end{bmatrix}\begin{bmatrix}u\\ v\end{bmatrix}\]
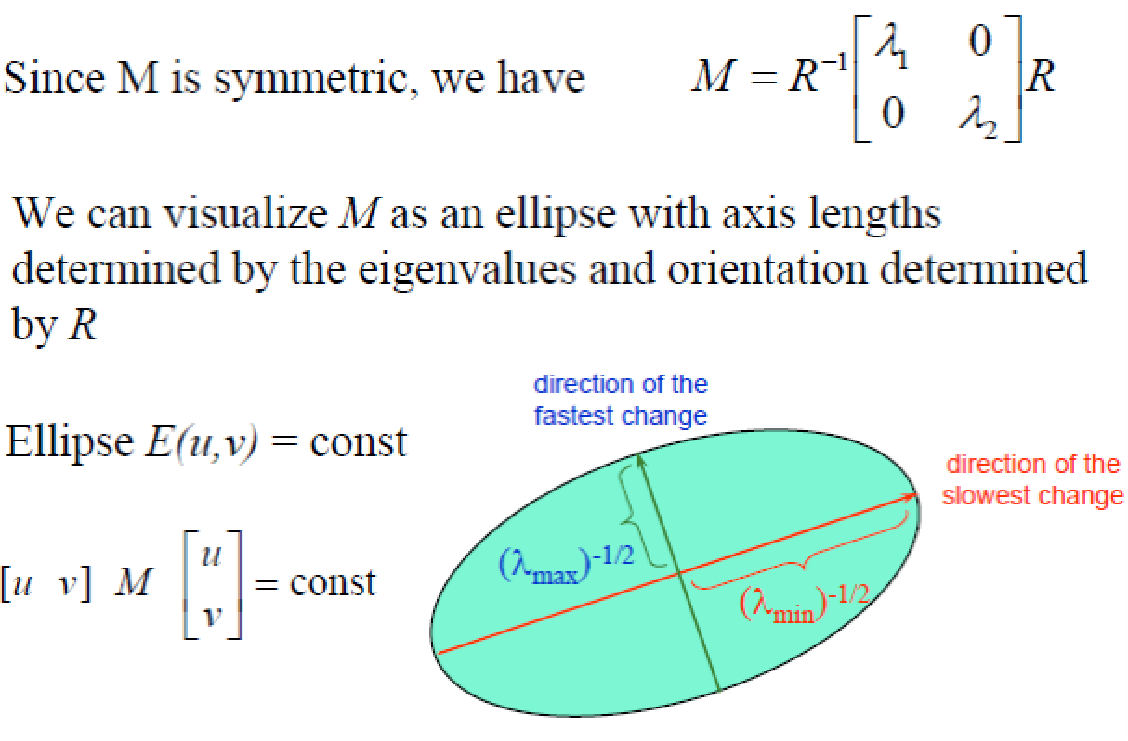
令\(H=\begin{bmatrix}I_x^2&I_xI_y\\ I_yI_x&I_y^2\end{bmatrix}\),其两个特征向量方向为下降最快的方向
当\(\lambda_+,\lambda_-\)都大时为角点。
步骤:
- 计算图像中每个点的梯度
- 通过梯度得到每个windows的H矩阵
- 计算特征值找到相应较大的点(\(\lambda_-\)>Threshold)
- 选择那些\(\lambda_-\)是局部极大值的点作为特征
问题:计算量大
解决:Harris算子
\[
f=\dfrac{\lambda_1\lambda_2}{\lambda_1+\lambda_2}=\dfrac{\det(H)}{\text{tr}(H)}
\]
性质:
- 旋转不变性
- 强度线性变换不变性:\(I\to I+b,I\to aI\)
- 无缩放不变性
解决:具有缩放不变性的特征检测
要求:在不同比例图像上极值点在同一个位置出现

Scale Invariant Detectors¶
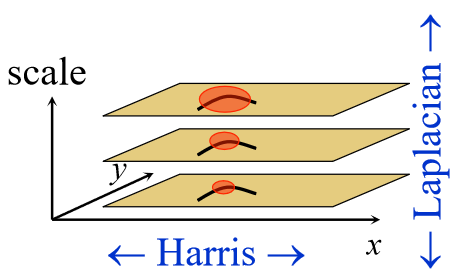
Harris-Laplacian¶
步骤:
- 在不同尺度上做Harris角点检测
- 若角点在不同尺度上都稳定存在,则通过第一道检验
- 选择最优尺度:利用Laplace值,选择Laplace值最大的尺度
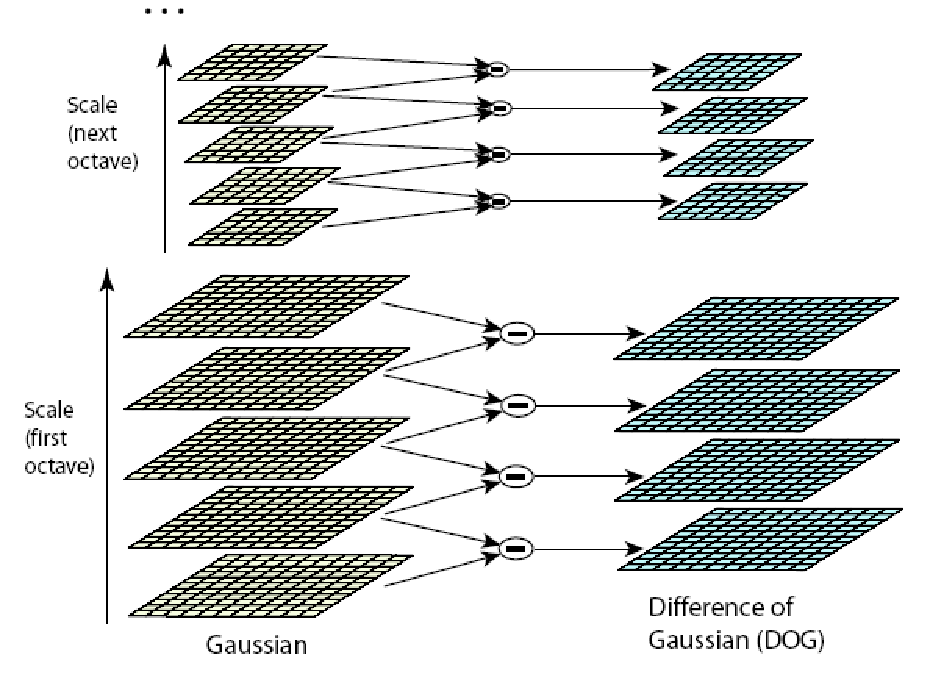
SIFT¶
卷积核:\(\text{DoG}=G(x,y,k\sigma)-G(x,y,\sigma)\)
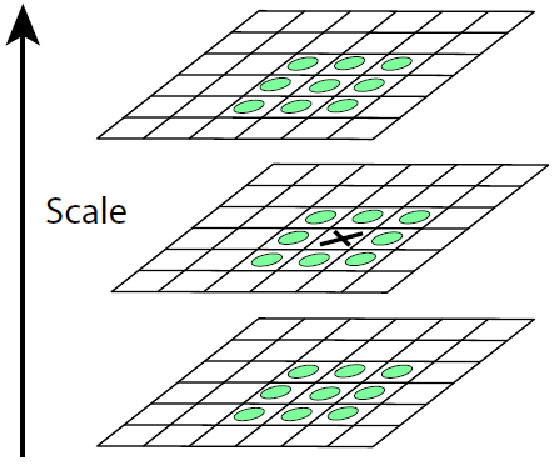
每个点同周围26个点比较来判断是否为极值
 梯度/角度计算:
梯度/角度计算:
\[
m(x,y)=\sqrt{(L(x+1,y)-L(x-1,y))^2+(L(x,y+1)-L(x,y-1))^2}
\]
\[
\theta(x,y)=\sigma\tan 2((L(x,y+1)-L(x,y-1))/(L(x+1,y)-L(x-1,y)))
\]
方向选择:
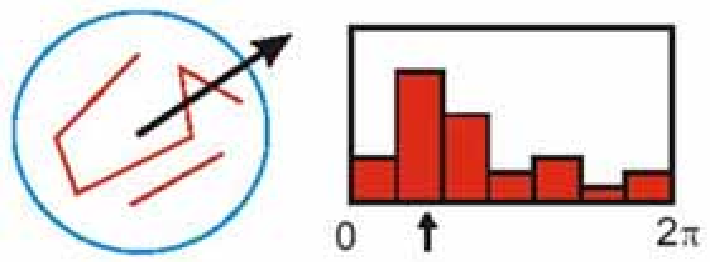
描述符:
- 不变性:在放射变换、亮度变换后不变的特征
- Scale Invariant Feature Transform:
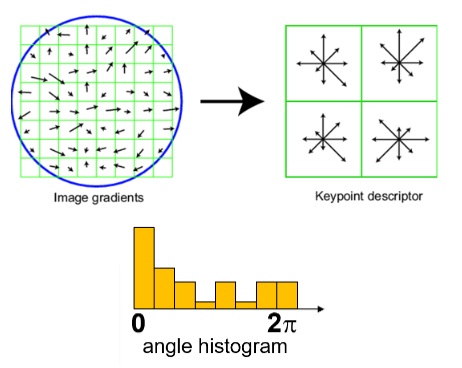
- 步骤:
- 在检测到的特征角点周围选取16 * 16的方形窗口
- 计算每个像素的边的朝向(梯度的角度-90°)
- 剔除弱边缘(小于阈值梯度幅度)
- 创建剩下边的方向的直方图
- 步骤: