A-star搜索
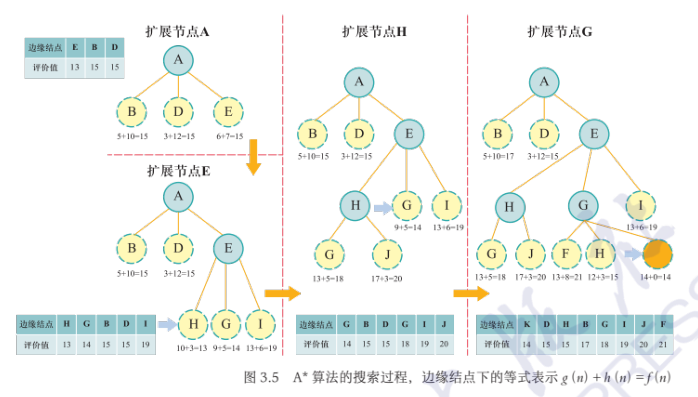
A*搜索:在评价函数中考虑从起始节点到当前节点的路径代价 \(f(n)=g(n)+h(n)\)
其中\(g(n)\)为起始节点到节点\(n\)代价(当前最小代价)
例:
处处最优 \(\Rightarrow\) 全局最优
性能分析:A*算法的完备性和最优性取决于搜索问题和启发函数的性质
- 记号:
- \(h(n)\):结点n的启发函数取值(直线距离)
- \(g(n)\):从起始结点到结点n所对应路径的代价
- \(f(n)\):结点n的评价函数取值
- \(c(n,a,n')\):从结点n执行动作a到达结点n'的单步代价
- \(h^*(n)\):从结点n出发到达终止结点的最小代价(实际距离)
- 可容性:\(\forall n:h(n)\leqslant h^*(n)\),即启发函数不会过高估计从节点\(n\)到终止节点所应该付出的代价(即估计代价小于等于实际代价)
- 一致性: \(h(n)\leqslant c(n,a,n')+h(n')\)三角不等式
graph LR;
A[n]--c---B["n'"]
B---C[E]
A---C证:设最短路为\(n_1\to n_2\to\cdots\to K\) \(h(K)=0\)
\(\because\)一致
\(\therefore h(n_1)\leqslant h(n_2)+c(n_1,a_1,n_2)\leqslant h(n_3)+c(n_2,a_2,n_3)+c(n_1,a_1,n_2)\)\(\leqslant\cdots\leqslant c(n_1,a_1,n_2)+c(n_2,a_2,n_3)+\cdots+c(n_1,a_1,K)=h^*(n_1)\)
定理2:A*完备性
- 搜索树中的分支数量是有限的,即每个结点的后继结点数量是有限的
- 单步代价的下界是一个正数
- 启发函数有下界
定理3:可容 \(\Rightarrow\) 最优
证:假设A*找到的终点为\(n\),\(\forall n'\in\)边缘节点,\(f(n)\leqslant f(n')\)
\(\therefore f(n)=g(n)+h(n)=g(n)\leqslant f(n')=g(n')+h(n')\leqslant g(n')+h^*(n')\)
\(\therefore\)为最短路